大型管道焊接机器人流水线
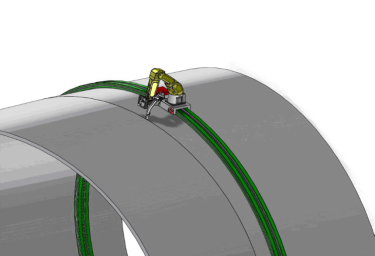
焊接对象:大型管道结构焊接。
移动方式:机器人手臂集成在柔性轨道上,可根据管道直径调整轨道长短。
系统配置:3D扫描技术,扫描计算并选择合适的焊接参数,根据前道扫描工序反馈的信息,它对焊接工序进行规划,包括:
1)确定焊接道数;
2)确定焊机参数;
3)确定各道焊接位置;
4)规划焊接流程中所需的额外扫描;
5)根据焊槽情况对焊接参数进行补偿。
评分:
总评分:0