小组立全智能焊接机器人流水线
焊接对象:针对造船中的先行及复杂面板的小组立平角焊、立角焊、及包角焊。
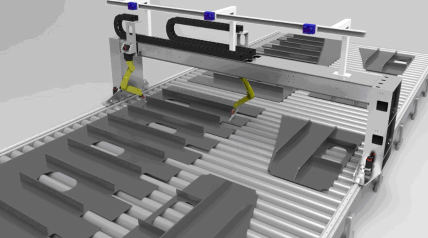
移动方式:两台机械臂悬挂在门架上,门架可沿X轴移动,门架上安装齿条可使机械臂沿着Y轴方向移动,门架下方的辊道自动输送焊接对象小组立。
系统配置:通过自主研发的ALPT技术、3D扫描仪技术、激光传感器寻位技术,自动识别焊缝位置信息,生成防碰撞焊接运动轨迹,完成焊接任务。
评分:
总评分:0
焊接对象:针对造船中的先行及复杂面板的小组立平角焊、立角焊、及包角焊。
移动方式:两台机械臂悬挂在门架上,门架可沿X轴移动,门架上安装齿条可使机械臂沿着Y轴方向移动,门架下方的辊道自动输送焊接对象小组立。
系统配置:通过自主研发的ALPT技术、3D扫描仪技术、激光传感器寻位技术,自动识别焊缝位置信息,生成防碰撞焊接运动轨迹,完成焊接任务。